〇、为什么这一篇是分水岭
到这里,前 19 篇已经把 Transformer 的所有重要部件单独讲了一遍:
- 第 9–13 篇 把 attention 拆开讲清了 Q、K、V、点积、softmax、scale 因子。
- 第 11 篇 讲了位置编码——为什么 attention 需要它、sin/cos 是怎么设计的。
- 第 14 篇 讲了 FFN 的角色——非线性、记忆容量、激活函数。
- 第 15 篇 讲了残差与归一化——梯度的高速公路。
- 第 16 篇 讲了 Multi-Head——多视角并行。
- 第 17 篇 讲了 causal mask——自回归的工程基础。
- 第 18 篇 讲了 \(O(n^2)\) 复杂度——长上下文的根本约束。
- 第 19 篇 讲了原论文的历史背景——这一切是怎么诞生的。
但 19 篇的逐个零件讲解,到这里必须合成一张完整的图。只有当你能闭着眼睛说出「一个 token 从被 tokenize 那一刻起,到最终 softmax 出概率分布,中间经过了哪 N 步」时,你才算真正理解 Transformer。
这一篇就来做这件事。我不再讲新东西(新概念全在前 19 篇),而是把所有部件串起来,跟随一个具体的 token 走完它在 Transformer 里的旅程。读完后你应该能徒手画出 Transformer 的全貌、解释每一个箭头的存在理由、说出训练时和推理时数据流的差异。
一、一张图:Transformer 的全貌
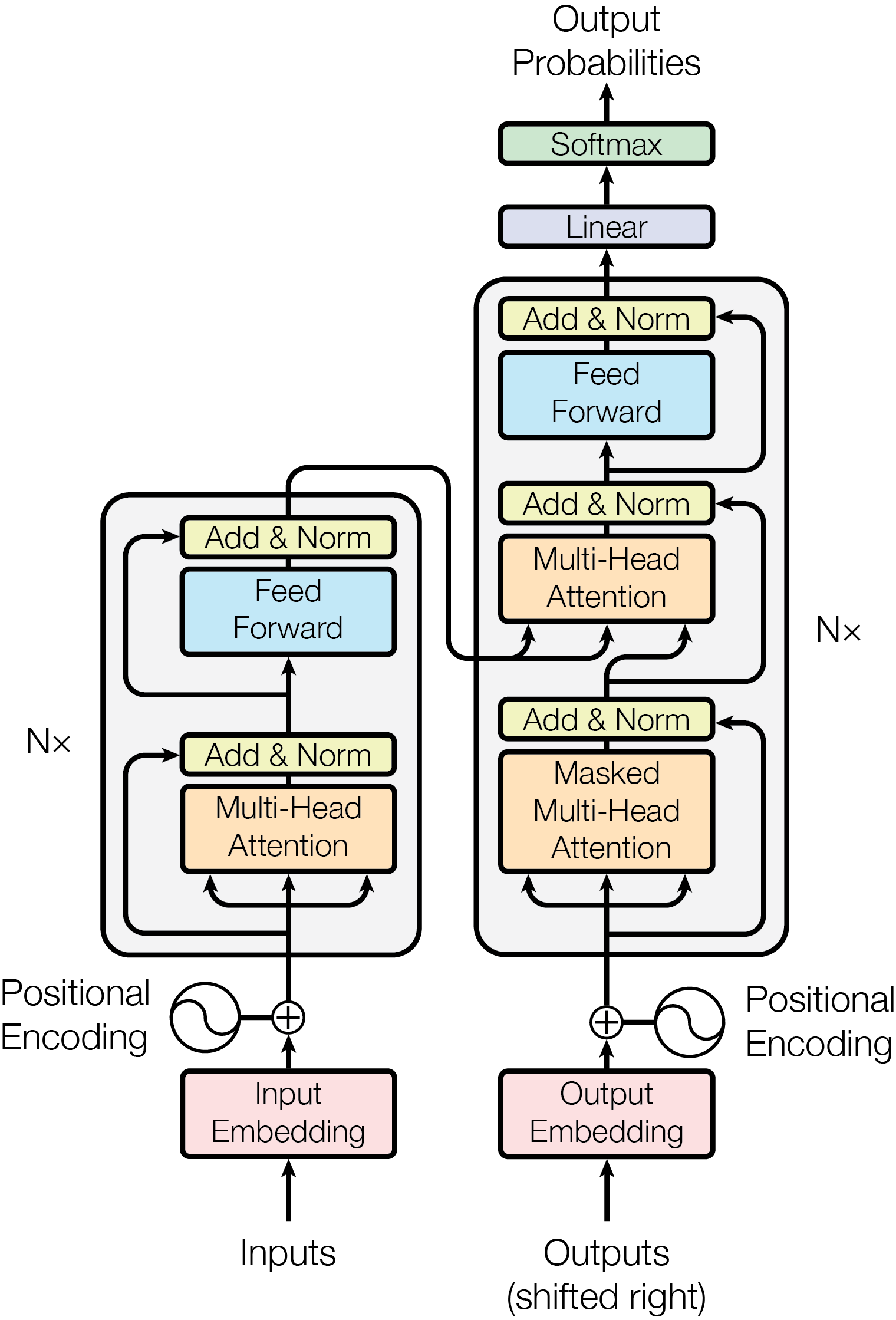
下图是论文 Figure 1 的清晰重绘版本,左边是 encoder(堆 \(N=6\) 层),右边是 decoder(堆 \(N=6\) 层),中间通过 cross-attention 连接:

这张重绘图在结构上与原论文 Figure 1 一致,只是为了教学可读性做了几处展开:把 positional encoding 与 embedding 合并显示、把 decoder 里的 encoder-decoder attention 直接标成了 cross-attention、把顶端输出头展开成了 linear \(\to\) softmax \(\to\) output probabilities。原图的本地副本见 ModalNet-21.png,官方来源可对照 arXiv HTML 的 Figure 1,图片直链见 arXiv PNG,PDF 版可见 NeurIPS proceedings。arXiv HTML 页面注明:在署名条件下,Google 允许将论文中的 tables and figures 用于 journalistic or scholarly works 的转载。
{kind=link}
{kind=link}
把这张图刻进脑子里。它的关键骨架是:
- 左边 encoder:处理源语言(待翻译的句子)。
- 右边 decoder:生成目标语言(翻译输出)。
- encoder 输出 → decoder 的 cross-attention:这是两边唯一的连接。
- decoder 输出 → linear → softmax → 词表概率。
这个架构在 2017 年是为机器翻译设计的,但今天的 LLM(GPT/LLaMA 等)只用了右半部分(decoder-only)。理解了完整图,就能瞬间理解 BERT(只用 encoder)和 GPT(只用 decoder)的关系。
二、Encoder Layer 内部:六个步骤
把 encoder 的一层放大,内部是这样的:

每一层做 6 件事:
- Multi-Head Self-Attention(输入 \(x\),输出 \(\operatorname{Attn}(x)\))
- Add:\(x + \operatorname{Attn}(x)\)(残差)
- LayerNorm
- Feed Forward(Linear \(\to\) ReLU \(\to\) Linear,宽度 \(4d\))
- Add:\(y + \operatorname{FFN}(y)\)(残差)
- LayerNorm
这 6 步组成一个 sublayer 群,N 层堆起来形成 encoder。
注意原论文用 Post-LN(Add 之后再 Norm)。今天大模型几乎全部用 Pre-LN(Norm 在 sublayer 前)。两者公式:
- Post-LN:\(\mathrm{out} = \operatorname{LayerNorm}(x + \operatorname{Sublayer}(x))\)
- Pre-LN:\(\mathrm{out} = x + \operatorname{Sublayer}(\operatorname{LayerNorm}(x))\)
Pre-LN 训练稳定性更好(第 15 篇展开过),是 GPT-2 之后的事实标准。
三、Decoder Layer 内部:九个步骤
decoder 比 encoder 多一个 sublayer(cross-attention),所以一层有 9 步:

9 步分成 3 个 sublayer 群:
第一组(Masked Self-Attention): 1. Masked Multi-Head Self-Attention(QKV 都来自 decoder 的输入 y) 2. Add(残差) 3. LayerNorm
第二组(Cross-Attention): 4. Cross-Attention(Q 来自 decoder,K、V 来自 encoder 的最终输出) 5. Add 6. LayerNorm
第三组(FFN): 7. Feed Forward 8. Add 9. LayerNorm
注意几个关键差异:
- 第一组的 Self-Attention 必须带 causal mask(第 17 篇主题),因为 decoder 生成时不能偷看未来 token。
- 第二组的 Cross-Attention 不需要 causal mask:encoder 输出是源序列,每个 decoder 位置都可以看完整源序列。
- 第二组里 K、V 来自 encoder 最后一层输出,这是 encoder 与 decoder 唯一的信息通道。这个设计直接继承自 2014 年 Bahdanau 的 RNN attention。
四、跟随一个 token 走完全程
让我们把 source = "Hello world"、target =
"Bonjour le monde" 的翻译过程,详细 trace
一遍。
第 1 步:tokenization
"Hello world" →
[15496, 995](假设 BPE 编码)。
"Bonjour le monde" →
[10222, 333, 7625]。
decoder 的输入要 shift right(首位加
BOS):[BOS, 10222, 333]。target
输出(要预测的):[10222, 333, 7625]。
第 2 步:embedding 查表
每个 token id \(\to d\) 维向量(\(d=512\) 的 base 模型)。结果: - source embeddings: 形状 \((2, 512)\) - target embeddings: 形状 \((3, 512)\)
embedding 矩阵 \(E\) 的形状是 \((\mathrm{vocab\_size}, 512)\)。论文里 source 和 target 共享同一个 \(E\)。
第 3 步:加位置编码
按位置 t 加 sin/cos:
\[ \operatorname{PE}_{t, 2i} = \sin\left(\frac{t}{10000^{2i/d}}\right), \qquad \operatorname{PE}_{t, 2i+1} = \cos\left(\frac{t}{10000^{2i/d}}\right) \]
\(x = \mathrm{embedding} + \operatorname{PE}\)。这一步把「位置信息」灌入了向量表示。第 11 篇详细讲过为什么这个编码能让模型 learn 出相对位置关系。
第 4 步:encoder 层逐层处理
source 进入 encoder layer 1:
- \(Q = xW_Q,\ K = xW_K,\ V = xW_V\)(每个 head 各一组)
- 计算 \(\operatorname{softmax}\left(\frac{QK^{\mathsf{T}}}{\sqrt{d_k}}\right)V\),得到 attention 输出
- 拼接所有 head,过 \(W_O\)
- 加残差 + LayerNorm
- 过 FFN
- 加残差 + LayerNorm
- 输出形状仍是 \((2, 512)\)
重复 6 次。最终 encoder 输出 \(\text{mem} \in \mathbb{R}^{2 \times 512}\),作为 decoder 的「记忆」。
第 5 步:decoder 层处理(训练时并行)
target embedding 的形状为 \((3, 512)\),进入 decoder layer 1:
Masked Self-Attention:QKV 都来自 \((3, 512)\) 自己,但 attention matrix 用下三角 mask 屏蔽未来。位置 0 只看 0;位置 1 看 0,1;位置 2 看 0,1,2。
Cross-Attention:Q 来自前一步输出 \((3, 512)\),\(K, V\) 来自 encoder 输出 \(\mathrm{mem} \in \mathbb{R}^{2 \times
512}\)。所以 attention matrix 是 \(3 \times 2\) 的(每个 decoder
位置对每个 encoder
位置)。这一步是「翻译」真正发生的地方,decoder 在生成
Bonjour 时,attention 主要 focus 在 source 的
Hello。
FFN:\((3, 512) \to (3, 2048) \to (3, 512)\)。
重复 6 层。
第 6 步:输出投影
decoder 最后一层输出 \((3, 512)\)。过一个 \(\operatorname{Linear}(512 \to \mathrm{vocab\_size})\),得到 \((3, \mathrm{vocab\_size})\),再过 \(\operatorname{softmax}\)。
每行是一个位置的下一个 token 概率分布。位置 0(输入
BOS)的输出预测应该是 Bonjour,位置 1(输入
Bonjour)预测 le,位置 2(输入 le)预测
monde。
第 7 步:loss 计算
cross-entropy over vocab,对 3 个位置取平均:
\[ \mathcal{L} = -\frac{1}{3}\sum_{t=0}^{2} \log p(y_t \mid y_{<t}, x) \]
backward propagation 一直传回到 embedding 表,所有矩阵都更新一步。
整个训练过程一次 forward 处理了 3 个目标位置。这就是 Transformer 训练比 LSTM 快几十倍的根源。
五、训练 vs 推理:两种执行方式
同样一组权重,训练和推理的执行方式完全不同:

训练(teacher forcing):
- 整个目标序列一次性喂入 decoder
- Causal mask 保证位置 t 只能看 0..t-1
- 一次 forward 同时算出所有位置的 loss
- 高度并行,\(O(1)\) 时间复杂度(不算 batch)
推理(autoregressive):
- 从 BOS 开始,逐 token 生成
- 每生成一个新 token,都要重新 forward 一次(实际用 KV cache 优化)
- 整体 \(O(m)\) 步,串行
- 这是为什么 LLM 推理慢的根本原因
理解这两种执行方式的差异,是理解所有「推理优化」(KV cache、speculative decoding、parallel decoding)的前提。
六、Encoder-only / Decoder-only / Encoder-Decoder:三种变体
原论文是 Encoder-Decoder,但 2018 年之后,工业界把它拆成了三种用法:
Encoder-only(BERT 派):
- 只用左半边
- 双向 attention(不带 mask)
- 适合理解类任务(分类、NER、QA)
- 代表:BERT、RoBERTa、ELECTRA
Decoder-only(GPT 派):
- 只用右半边,但去掉 cross-attention
- 全程 causal mask
- 适合生成类任务(语言建模、对话)
- 代表:GPT 系列、LLaMA、Mistral、Qwen
- 现在 LLM 主流
Encoder-Decoder(原版/T5 派):
- 完整结构
- 适合「输入→输出」的任务(翻译、摘要、问答)
- 代表:原 Transformer、T5、BART
- 工程复杂度高,逐渐被 decoder-only + 长上下文取代
下面这张表对比了三种变体的工程权衡:
| 维度 | Encoder-only | Decoder-only | Encoder-Decoder |
|---|---|---|---|
| Self-attention mask | 双向 | causal | encoder 双向、decoder causal |
| 推理形式 | 一次前向 | 自回归 | 自回归 |
| 训练目标 | MLM | LM | seq2seq |
| 主要用途 | 理解 | 生成 | 翻译/摘要 |
| 参数效率 | 高(全用) | 高(全用) | 低(参数翻倍) |
| 灵活性 | 任务化强 | 通用 | 任务化强 |
| 时代 | 2018–2020 | 2020+ | 2017–2020 |
七、为什么 Decoder-only 最终胜出
七年间,三种变体逐渐演化成今天 decoder-only 一家独大。原因不是 decoder-only 在理论上最优,而是几个工程现实的合力:
1)Pretraining-finetuning 范式。GPT-3 证明 decoder-only 可以靠 in-context learning 适配新任务。这一发现让「先训一个通用 LM 再当成任何工具」的范式诞生,encoder-decoder 的「为每个任务做专门 fine-tune」范式被淘汰。
2)数据简单。decoder-only 只要纯文本、自回归预测下一个 token。encoder-decoder 训练需要构造 (input, output) 对,数据更难规模化。
3)参数效率。同样的总参数量,decoder-only 全部用于「建模文本」;encoder-decoder 一半用于 encode,一半用于 decode,对 generation 任务来说浪费。
4)KV cache 优化路线清晰。decoder-only 的推理优化(KV cache、PagedAttention、speculative decoding)路线明确,工业界投入巨大;encoder-decoder 的优化生态弱很多。
5)任务统一。一切任务都可以转成「输入 prompt → 输出 text」的形式,decoder-only 天然胜任。「翻译」也只需要 prompt:「把这句翻译成法语:Hello world」。
这就是为什么 GPT、LLaMA、Claude、Gemini 全是 decoder-only 的原因。Encoder-only(BERT 派)现在主要存活在「精排、向量检索、文本分类」这些经典 NLP 任务里;encoder-decoder 主要存活在 T5 派的研究里。
八、参数量分布:base 模型的内部账本
论文 base 模型(\(d=512\)、\(L=6\)、\(h=8\)、\(d_{\mathrm{ff}}=2048\)、\(\mathrm{vocab}=37\mathrm{k}\))的参数构成:
Embedding:\(\mathrm{vocab} \times d = 37000 \times 512 \approx 19\mathrm{M}\)
每个 encoder layer:
- Self-attention:\(4d^2 = 4 \times 512^2 \approx 1.05\mathrm{M}\)(\(W_Q, W_K, W_V, W_O\))
- FFN:\(2 \times d \times 4d = 2 \times 512 \times 2048 \approx 2.1\mathrm{M}\)
- LayerNorm:\(2 \times 2d \approx 0.002\mathrm{M}\)(可忽略)
- 单层合计 \(\approx 3.15\mathrm{M}\)
- 6 层 \(= 18.9\mathrm{M}\)
每个 decoder layer:
- Masked Self-attention:\(1.05\mathrm{M}\)
- Cross-attention:\(1.05\mathrm{M}\)
- FFN:\(2.1\mathrm{M}\)
- 单层合计 \(\approx 4.2\mathrm{M}\)
- 6 层 \(= 25.2\mathrm{M}\)
输出投影:与 embedding 共享,0 增。
合计:\(19\mathrm{M} + 19\mathrm{M} + 25\mathrm{M} \approx 63\mathrm{M}\)。论文写「\(65\mathrm{M}\)」,差距来自 LayerNorm/positional 等小项。
注意几个观察:
- FFN 占了约 \(2/3\) 的参数(每层 \(2.1\mathrm{M} / 3.15\mathrm{M} \approx 67\%\))
- Attention 各项加起来才 \(33\%\)
- 这就是为什么 MoE 把 FFN 稀疏化能极大省参数
把这个账本记在心里,看到任何 Transformer 架构都能秒算参数量。
九、关键概念回顾
- \(\mathrm{Transformer} = \mathrm{encoder} \times N + \mathrm{decoder} \times N + \mathrm{embedding} + \mathrm{linear}/\mathrm{softmax}\)
- Encoder layer 6 步:\(\operatorname{MHA} \to \operatorname{AddNorm} \to \operatorname{FFN} \to \operatorname{AddNorm}\)
- Decoder layer 9 步:\(\operatorname{MaskedMHA} \to \operatorname{AddNorm} \to \operatorname{CrossAttn} \to \operatorname{AddNorm} \to \operatorname{FFN} \to \operatorname{AddNorm}\)
- Cross-attention 是 encoder/decoder 唯一连接:Q 来自 decoder,KV 来自 encoder
- 训练 teacher forcing 并行;推理 autoregressive 串行
- 三种变体:encoder-only(BERT)、decoder-only(GPT)、encoder-decoder(T5)
- 现代 LLM 几乎都是 decoder-only
- base \(65\mathrm{M}\) 参数中 FFN 占约 \(2/3\),attention 占约 \(1/3\)
十、常见误解
- 「encoder 是给 decoder 提供条件」——准确,但更精确说:encoder 只在 cross-attention 阶段提供 K、V。
- 「decoder 也有 cross-attention 是必要的」——只在 encoder-decoder 架构里有。decoder-only 模型(GPT)没有 cross-attention。
- 「Linear+Softmax 是模型的输出层」——是的,但参数和 embedding 共享(论文版本)。今天大模型不再共享。
- 「位置编码加在每一层」——错。位置编码只在最底层(embedding 之后)加一次,后续层都通过残差和 attention 传递。
- 「Transformer 架构七年没变」——结构骨架没变,但细节几乎全换了:Pre-LN 替代 Post-LN,RoPE 替代正弦位置编码,SwiGLU 替代 ReLU,RMSNorm 替代 LayerNorm,GQA 替代 MHA。
- 「encoder-decoder 比 decoder-only 强」——在翻译这种结构化 seq2seq 任务上略强,在通用任务上 decoder-only 更灵活。
十一、本系列的下一步
第 20 篇是 Transformer 系列前半部分的总结。从第 21 篇开始,本系列将进入两条主线:
主线 A(架构演进):第 21–35 篇覆盖 BERT、GPT、T5 详解,以及 RoPE、ALiBi、GQA、MoE、RMSNorm、SwiGLU 等近代架构改进。
主线 B(推理与工程):第 36–50 篇覆盖 KV cache、PagedAttention、FlashAttention、量化、speculative decoding、长上下文等推理优化。
如果第 20 篇你能合上眼睛画出完整 Transformer 图,那么后面所有的「改进」与「优化」都只是在这张图上做局部替换。Transformer 七年来真正变化的只是细节,骨架仍是 2017 年的样子。
这正是这篇论文最了不起的地方:在它之后,所有人都只是在它的图上修修补补。
参考文献
- Vaswani A. et al. Attention Is All You Need. NeurIPS 2017. arXiv:1706.03762.
- Devlin J. et al. BERT. NAACL 2019. arXiv:1810.04805.
- Radford A. et al. Improving Language Understanding by Generative Pre-Training(GPT-1). 2018.
- Raffel C. et al. Exploring the Limits of Transfer Learning with a Unified Text-to-Text Transformer(T5). JMLR 2020. arXiv:1910.10683.
- Lewis M. et al. BART. ACL 2020. arXiv:1910.13461.
- Brown T. et al. GPT-3. NeurIPS 2020. arXiv:2005.14165.
- Touvron H. et al. LLaMA. 2023. arXiv:2302.13971.
- Xiong R. et al. On Layer Normalization in the Transformer Architecture(Pre-LN 分析). ICML 2020. arXiv:2002.04745.
← 上一篇:19.《Attention Is All You Need》论文背景 | 下一篇:21. 位置编码 →
同主题继续阅读
把当前热点继续串成多页阅读,而不是停在单篇消费。
【Transformer 与注意力机制】22|Encoder 详解:6 层堆叠到底在做什么
把 Transformer encoder 从“左半边”这个模糊概念拆成可操作的结构:单层里 self-attention、FFN、残差、LayerNorm 各做什么;6 层堆叠为什么不是重复劳动;encoder 输出为什么适合理解任务而不直接擅长生成;以及它和 decoder-only、encoder-decoder 两条路线到底差在哪。
【Transformer 与注意力机制】58|后 Transformer 时代:架构会消失还是会进化
后 Transformer 时代不太可能是某个新架构一夜之间消灭 Transformer,更可能是 attention、SSM、MoE、检索、外部记忆、工具调用和多模态模块逐渐混合。本文回顾本系列主线,解释为什么 Transformer 很难突然消失,也为什么它不可能原样解决所有问题。
【Transformer 与注意力机制】55|Transformer 的根本局限:为什么 O(n²) 是终极瓶颈
Transformer 的成功没有消除它的结构性代价。本文区分工程瓶颈和架构瓶颈,解释 O(n²) attention、KV Cache 线性增长、自回归串行性、长上下文与长期记忆的差异、位置外推和数据效率问题,并说明为什么 Mamba、RWKV、RetNet、线性注意力等路线都在试图绕开同一组限制。
【Transformer 与注意力机制】23|Decoder 详解:为什么它天生适合生成
把 Transformer decoder 拆开讲透:masked self-attention、cross-attention、FFN 三块子层如何串起来;训练时为什么能并行、推理时为什么必须串行;以及 decoder-only 为什么会成为 GPT 时代的主流路线。